Шаговый двигатель расчет - Выбор двигателя. Примеры определения требуемых моментов

Выбор правильного приводного механизма для шаговых двигателей штабелируемых банок
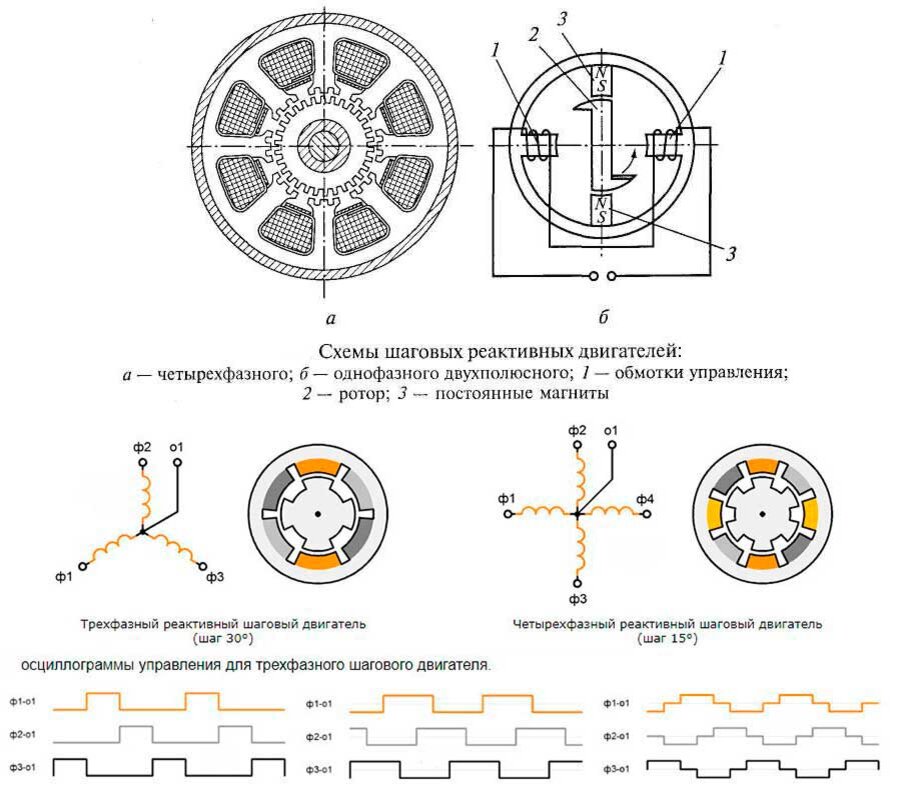
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза рис 8а. Этот способ называют "one phase on" full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с точками равновесия ротора у незапитанного двигателя. Это означает, что в таком режиме не может быть получен полный момент. Второй способ - управление фазами с перекрытием: две фазы включены в одно и то же время.











Большинство систем перемещения на основе шаговых двигателей работают в разомкнутом контуре и поэтому большей частью недороги. По сути, шаговые системы предлагают единственно возможную технологию движения, которая способна осуществлять управление положением без обратной связи. Однако, когда шаговые двигатели работают на нагрузку в разомкнутом контуре, может произойти потеря синхронности заданных и реальных шагов. Управление по замкнутому контуру — это разновидность традиционного шагового перемещения. Оно является экономичной альтернативой в тех случаях, когда требуется большая надежность, безопасность или гарантия качества. В последнее время управление по замкнутому контуру CLC шаговых приводов помогает реализовывать архитектуры распределенного интеллектуального перемещения.





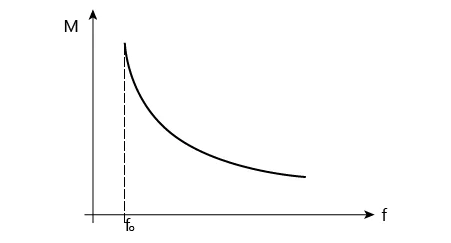
Электрический двигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. Чаще всего эта механическая энергия характеризуется частотой вращения и крутящим моментом двигателя. В данном руководстве по покупкам будут рассмотрены только двигатели этого типа.